Z Domain Transfer Function To Difference Equation

Z Transform Of Difference Equations
Difference Equation Descriptions For Systems Youtube
Http Www Ee Ic Ac Uk Pcheung Teaching De2 Ee Lecture 2011 20discrete 20time 20systems 20 X2 Pdf
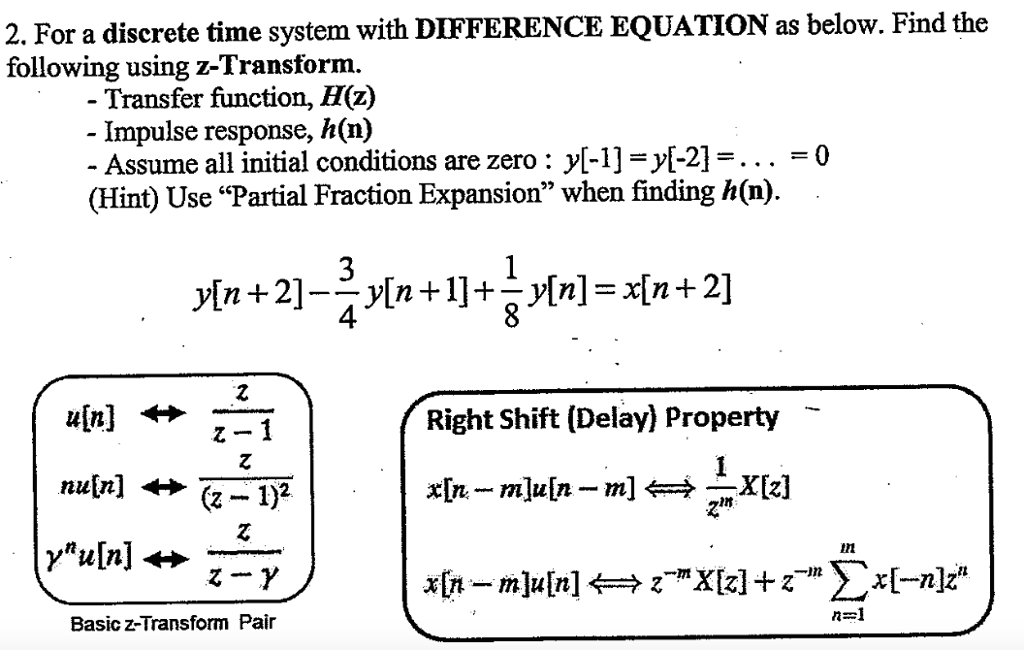
Solved 2 For A Discrete Time System With Difference Equa Chegg Com

Finding The Difference Equation From The System Transfer Function Youtube
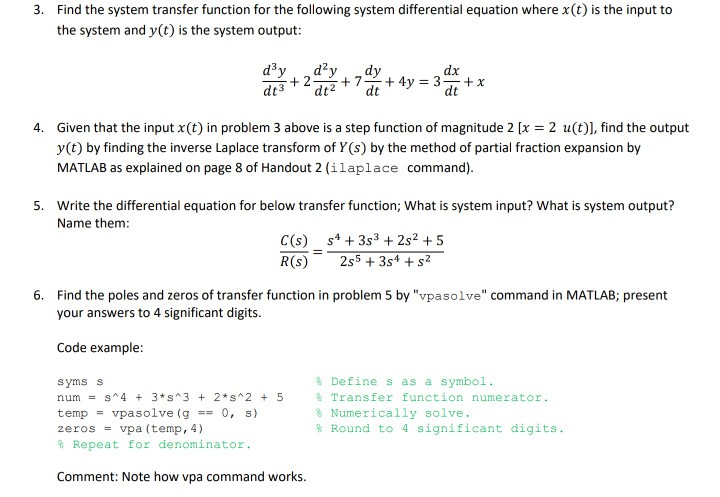
Solved Find The System Transfer Function For The Followin Chegg Com
I have a z domain transfer function for a discrete time system i want to convert it into the impulse response difference equation form.
Z domain transfer function to difference equation. Often we will denote it h z. In matlab notation as indexes must start from 1 if we. The qi s are the roots of the equation n z 0 and are called the system zeros. It shows how signals flows in the system and the operations being performed on the signals.
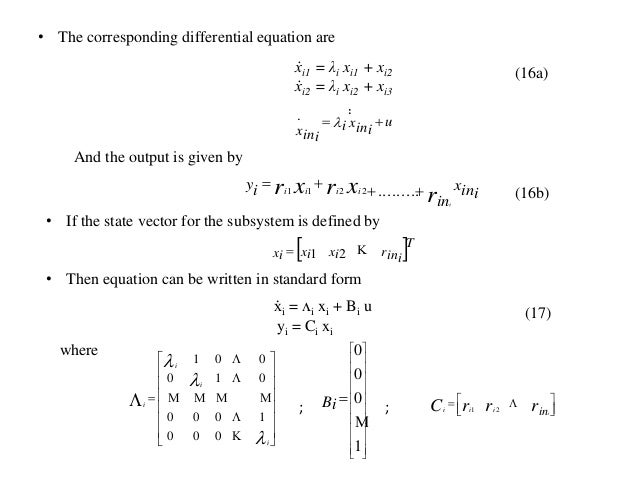
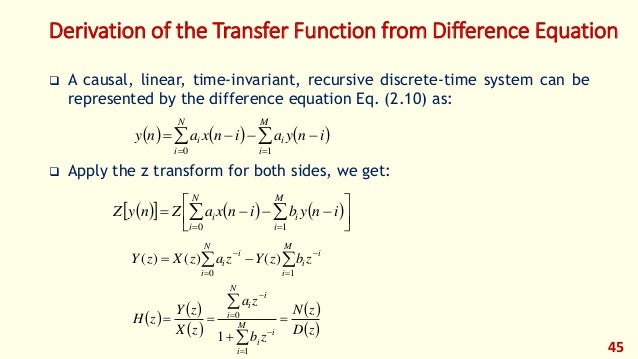
The need for. Transfer functions in the z domain a very important category of lti systems is described by difference equations of the following type 00 nm kk kk aynk bxnk from which through z transform we obtain 0 0 m k k k n k k k bz hz az and 1 01 1 01 m m n n bbz bz yz x z aaz az where h z is the transfer function of the system. Answers 1 honglei chen on 27 jun 2012. The di erence equation p r y q r x with initial conditions x n 0 and y n 0 for n 0 called rest initial conditions satis es y q z 1 p z 1 x.
I am working on a signal processor. 3 as transfer function in z domain this is similar to the transfer function for. Link direct. In case the system is defined with a difference equation we could first calculate the impulse response and then calculating the z transform.
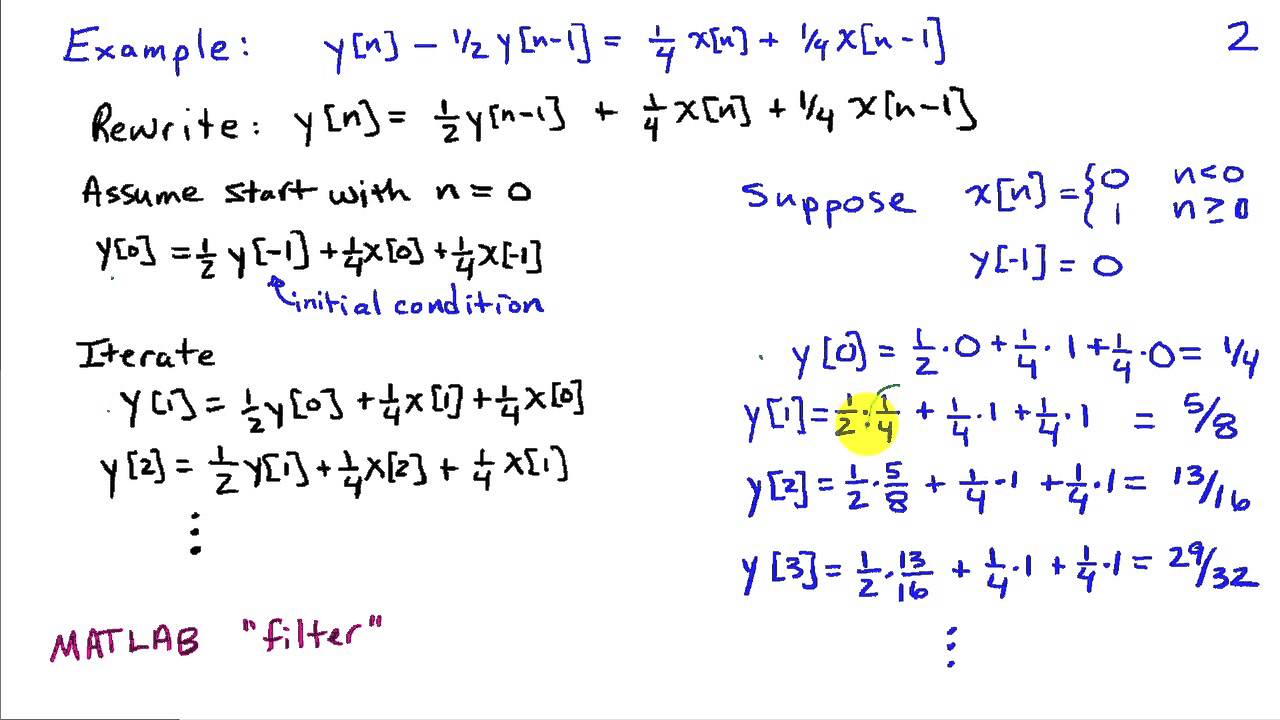
Z transform of difference equations since z transforming the convolution representation for digital filters was so fruitful let s apply it now to the general difference equation eq. Thus with rest ic y z x z h z. The filter order equals the number of poles or zeros in the transfer function whichever is greater. As an example consider the following difference equation.
Show hide all comments. System or transfer function theorem. Sign in to comment. Using the formula for the z transform of rwe get 1 8z 1 7z 2 y 1 z x.
Sign in to answer this question. 2 as difference equation this relates input sample sequence to output sample sequence. We call q z 1 p z 1 the system function. H z y z x z.
But it is far easier to calculate the z transform of both sides of the difference equation. To do this requires two properties of the z transform linearity easy to show and the shift theorem derived in 6 3 above. Please help me how to do it are there any direct functions. The pi s are the roots of the equation d z 0 and are defined as the system poles.
Y n 1 5y n 1 0 5y n 2 0 5x n remember that. If x n is the input of your discrete time system and y n is the output then the transfer fucntion h z is written as.
Transfer Function Representations Of Linear Physical Systems
Dsp 2018 Foehu Lec 04 The Z Transform
Http Www Ee Ic Ac Uk Pcheung Teaching De2 Ee Lecture 206 20 20systems 20 20laplace 20transform 20 X1 Pdf
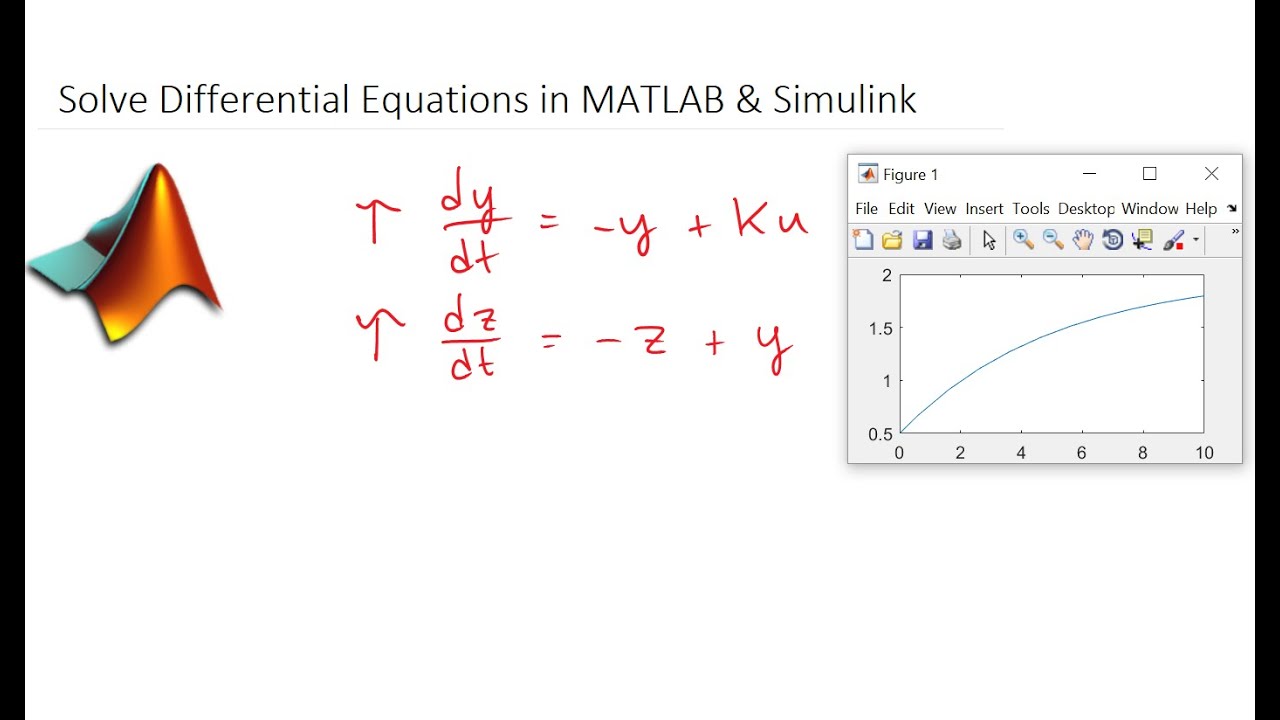
Solve Differential Equations In Matlab And Simulink Youtube

Laplace In S Domain Laplace Laplace Transform Simple Nail Designs Acrylic

Signals Systems For Dummies Cheat Sheet In 2020 Laplace Transform Data Science Differential Equations

Bernoulli S Equation For Differential Equations Youtube

Solve Differential Equations In Python Youtube
Transformation Single Diff Eq Transfer Function

Quarter Car Suspension Modeling And Simulation In Xcos Transfer Function Differential Equations Engineering
Transformation Transfer Function State Space

Standard Differential Equation For Lti Systems Youtube

Solved Consider A Continuous Time Lti System Whose Impuls Chegg Com